











Комбинированное нечеткое управление процессом нагрева с дискретной подачей пара
В настоящей заметке рассматривается комбинированный нечеткий регулятор нагрева различных изделий на оборудовании с дискретным клапаном подачи пара. При управлении в прямом контуре используется традиционный аналитический регулятор, а в дополнительном контуре нечеткий блок для коррекции коэффициентов усиления регулятора прямого контура. Адаптация коэффициентов усиления прямого контура особенно актуальна при внештатных ситуациях, флуктуациях температуры, аварийных ситуациях и проч. В частности, алгоритм может быть применен в автоклаве «А9-КСС», предназначенном для стерилизации рыбных и мясных консервов. Система управления автоклава построена на базе персонального компьютера (верхний уровень) и промышленного контроллера Direct logic семейства DL-205 (нижний уровень). СУ является иерархической по информационной модели, функциям управления и программному обеспечению. Технические средства контроллера Direct Logic обеспечивают автономную работу системы управления без верхнего уровня. Для оперативного управления технологическим процессом применяется малогабаритный пульт управления. К достоинствам контроллеров Direct Logic относится работа в промышленных условиях: температура 0…60оС, влажность 50%; наличие сертификата Госстандарта России на средства измерения; разрешение Госгортехнадзора России на применение. На базе персонального компьютера организовано автоматизированное рабочее место диспетчера, обеспечивающее индикацию параметров технологического процесса, сигнализацию нарушений режима обработки. Ввод, редактирование числовых значений программы стерилизации осуществляется после ввода соответствующего пароля. Программное обеспечение верхнего уровня выполнено в среде Wonderware InTouch – наиболее распространённого пакета средств разработки диспетчерских и операторских панелей АСУ ТП. Приложение на базе InTouch позволяет следить за технологическим процессом стерилизации, в графическом и цифровом виде визуализировать параметры в реальном масштабе времени, архивировать данные. Окно «Редактор программы стерилизации» (рис. 1) предназначено для ввода программы стерилизации (давление, температура и время стерилизации; время нарастания, запаздывания и охлаждения, конечная температура). СУ автоклава выполняет следующие технологические задачи: - регулирование температуры; - поддержание заданного давления. Кроме этого, контроллер обеспечивает выполнение различных диагностических функций: блокировки, перевод установки в безопасное состояние при возникновении аварийных ситуаций (отклонение температуры и давления от допустимых ограничений или неправильные действия оператора). Два контура регулирования системы управления, температуры и давления, существенно отличаются друг от друга по инерционным характеристикам. Так, малое время инерции при управлении давлением, позволяет реализовать релейный закон с небольшим гистерезисом. Источником нагрева является пар давлением от 4 до 8 атмосфер. Замена пропорционального клапана, позволяющего подавать пар в непрерывном режиме через дросселирующее отверстие, на дискретный, с одной стороны, позволило повысить надежность и упростить аппаратное решение, с другой стороны, значительно усложнило закон регулирования. Клапан работает в режиме «открыт-закрыт», следовательно, скорость нагрева определяется временем открытия клапана за время вычислительного цикла. Время управляющего воздействия Zi рассчитывается по следующей формуле: Zi = Zi-1 ± k1 ΔT ± k2 ΔV ± k3 d2T/dt2 (1), где: - Zi-1 - время управляющего сигнала за предыдущий вычислительный цикл; - ΔT - разница между текущей и заданной температурой; - ΔV - разница между текущей и заданной скоростью изменения температуры за время вычислительного цикла (ΔV = Vi – Vз); - d2T/dt2 - вторая производная изменения температуры за время вычислительно цикла; - k1, k2, k3 – коэффициенты усиления регулятора. Несмотря на универсальность формулы (1), оптимальную настройку коэффициентов усиления на каждом участке управляющей программы (нагрев, полочка, охлаждение), специфика дискретной подачи пара обусловила появление ряда ситуаций, наиболее эффективно описываемых интуицией оператора. С целью учета знаний оператора в контур регулирования температуры введен блок нечеткого корректора коэффициентов. Функции нечеткого блока коррекции коэффициентов усиления выполняет программный модуль контроллера, который обрабатывает входную информацию (достоверность, выбраковка, усреднение) для формирования массива данных, включающего разницу между текущей и заданной температурой, скорость изменения температуры, производную скорости температуры. Данные массивов служат исходной информацией для алгоритма регулирования. Задача управления состоит в определении времени открытия клапана подачи пара за время вычислительного цикла по функциональной зависимости (1) и настройке коэффициентов усиления регулятора блоком нечеткой логики по следующим входным переменным: ΔV, d2T/dt2. Реализация алгоритма регулирования температуры выполнена на базе следующих аппаратных средств контроллера: - 4-канального аналогового модуля «F2-04AD-1»; - 12-канального модуля дискретных релейных выходов «D2-12TR. Модуль «F2-04AD-1» контроллера конвертирует входные аналоговые сигналы (4mA … 20mA) от датчиков температуры и давления, преобразует их значение в инженерные единицы измерения, индицирует на малогабаритном пульте ОР-1312. 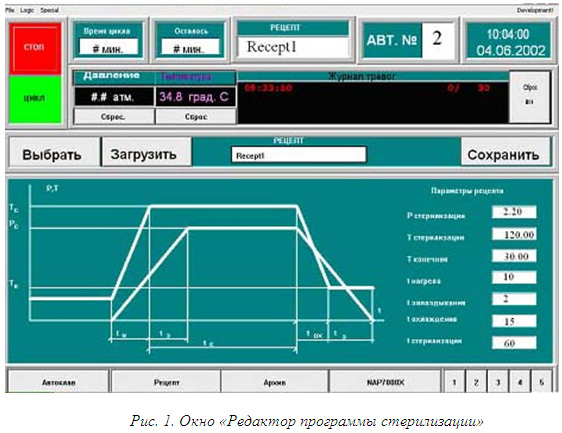
Как пример приведем формализацию знаний оператора на участке нарастания температуры. Сформулирует ряд правил для ситуаций, в которых управление по аналитической зависимости (1) неэффективно:
1. ΔV – малая отрицательная, d2T/dt2 – большая положительная, тогда - k1 – минимальный, k2 - минимальный, k3 - минимальный.
2. ΔV – большая отрицательная, d2T/dt2 – большая положительная, тогда - k1 – минимальный, k2 - малый, k3 - малый.
3. ΔV – малая отрицательная, d2T/dt2 – малая положительная, тогда - k1 – малый, k2 - средний, k3 - малый.
4. ΔV – большая отрицательная, d2T/dt2 – малая положительная, тогда - k1 – малый, k2 - большой, k3 – средний.
Для случаев, неоговоренных в правилах, закон регулирования соответствует аналитической зависимости (1) с определенными коэффициентами усиления.
Итак, для нечеткого блока коррекции коэффициентов усиления исходной информацией являются лингвистические переменные ΔV и d2T/dt2.
На первом этапе необходимо определить степени для предпосылок каждого правила: Аi(ΔV), Bi(d2T/dt2).
Далее находятся уровни «отсечения» для предпосылок каждого из правил с использованием операции минимум:
ά i =min(=min(Аi(ΔТ), Bi(dТ/dt))
На заключительном этапе определяем четкое значение переменной вывода по формуле:
Z = ∑ ά iz i/ ∑ ά i
Входной сигнал от термопары через нормализатор поступает на аналого-цифровой модуль «F2-04AD-1» контроллера. Предположим, что аналоговый сигнал ограничен диапазоном [↔1, 1] и преобразуется в цифровую форму с дискретностью 0,2: -1; -0,8; -0,6; -0,4; -0,2; 0; 0,2; 0,4; 0,6; 0,8; 1.
Определим для лингвистической переменной ΔV нечеткие множества с соответствующей функцией принадлежности:
А1 – большая положительная;
А2 – малая положительная;
А3 – нулевая;
А4 – малая отрицательная;
А5 – большая отрицательная.
Таблица 1. Значения функций принадлежности лингвистической переменной ΔV
|
АЦП ºС |
-1 (-5) |
-0,8 (-4) |
-0,6 (-3) |
-0,4 (-2) |
-0,2 (-1) |
0 0 |
0,2 (1) |
0,4 (2) |
0,6 (3) |
0,8 (4) |
1 (5) |
|
А1(ΔV) |
0 |
0 |
0 |
0 |
0 |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
|
А2(ΔV) |
0 |
0 |
0 |
0 |
0 |
0,2 |
0,5 |
1 |
0,8 |
0,6 |
0,3 |
|
А3(ΔV) |
0 |
0 |
0 |
0,1 |
0,5 |
1 |
0,5 |
0,1 |
0 |
0 |
0 |
|
А4(ΔV) |
0,3 |
0,6 |
0,80 |
1 |
0,9 |
0,7 |
0,5 |
0 |
0 |
0 |
0 |
|
А5(ΔV) |
1 |
0,80 |
0,6 |
0,4 |
0,2 |
0 |
0 |
0 |
0 |
0 |
0 |
Определим для лингвистической переменной d2T/dt2 нечеткие множества с соответствующей функцией принадлежности:
В1 – большая положительная;
В2 – малая положительная;
В3 – нулевая;
В4 – малая отрицательная;
В5 – большая отрицательная.
Таблица 2. Значения функций принадлежности лингвистической переменной d2T/dt2
|
АЦП ºС |
-1 (-2,5) |
-0,8 (-2) |
-0,6 (-1,5) |
-0,4 (-1) |
-0,2 (-0,5) |
0 0 |
0,2 (0,5) |
0,4 (1) |
0,6 (1,5) |
0,8 (2) |
1 (2,5) |
|
В1(d2T/dt2) |
0 |
0 |
0 |
0 |
0 |
0 |
0,1 |
0,3 |
0,5 |
0,8 |
1 |
|
В2(d2T/dt2) |
0 |
0 |
0 |
0 |
0 |
0,3 |
0,5 |
1 |
0,8 |
0,5 |
0,3 |
|
В3(d2T/dt2) |
0 |
0 |
0 |
0,1 |
0,5 |
1 |
0,5 |
0,1 |
0 |
0 |
0 |
|
В4(d2T/dt2) |
0,3 |
0,6 |
0,80 |
1 |
0,5 |
0,3 |
0 |
0 |
0 |
0 |
0 |
|
В5(d2T/dt2) |
1 |
0,70 |
0,5 |
0,3 |
0,1 |
0 |
0 |
0 |
0 |
0 |
0 |
Выходной сигнал формируется с помощью ЦАП и имеет 5 уровней: -1 (минимальный), -0,5 (малый), 0 (средний), 0,5 (большой), 1 (максимальный). Управляющий аналоговый сигнал (0 … 10 В) записывается в ячейку модуля аналогового выхода «F2-02DA-2».
Определим для нечетких лингвистических переменных ΔV, d2T/dt2 нечеткие множества с соответствующими идентификаторами для функций принадлежности μ(ΔV), μ(d2T/dt2).
Для μ(ΔV) эти идентификаторы имеют вид:
РМ – отклонение положительное большое;
PSZ - отклонение положительное малое;
ZR - отклонение нулевое;
NSZ - отклонение отрицательное малое;
NM - отклонение отрицательное большое.
С учетом заданных нечетких множеств база правил эвристического алгоритма имеет вид для определения коэффициента усиления k1:
R1: если ΔV = NSZ, d2T/dt2 = РМ, тогда k1=↔1
R2: если ΔV = NM, d2T/dt2 = РМ, тогда k1 =↔1
R3: если ΔV = NSZ, d2T/dt2 = PSZ, тогда k1 =↔0,5
R4: если ΔV = NM, d2T/dt2 = PSZ, тогда k1 =↔0,5
С учетом заданных нечетких множеств база правил эвристического алгоритма имеет вид для определения коэффициента усиления k2:
R1: если ΔV = NSZ, d2T/dt2 = РМ, тогда k2=↔1
R2: если ΔV = NM, d2T/dt2 = РМ, тогда k2 =↔0,5
R3: если ΔV = NSZ, d2T/dt2 = PSZ, тогда k2 =0
R4: если ΔV = NM, d2T/dt2 = PSZ, тогда k2 =0,5
С учетом заданных нечетких множеств база правил эвристического алгоритма имеет вид для определения коэффициента усиления k3:
R1: если ΔV = NSZ, d2T/dt2 = РМ, тогда k3=↔1
R2: если ΔV = NM, d2T/dt2 = РМ, тогда k3 =↔0,5
R3: если ΔV = NSZ, d2T/dt2 = PSZ, тогда k3 =↔0,5
R4: если ΔV = NM, d2T/dt2 = PSZ, тогда k3 =0
Рассмотрим конкретный вариант выбора решения коэффициента k1 при следующих значениях входных переменных: ΔV = -2ºC, d2T/dt2 = 2ºC/цикл.
ά1 =min(1; 0,8) = 0,8 и z = ↔1
ά2 =min(0,4; 0,8) = 0,4 и z = ↔1
ά3 =min(1; 0,5) = 0,5 и z = ↔0,5
ά4 =min(0,4; 0,5) = 0,4 и z = ↔0,5
Выход регулятора:
Z = (0,8 ↔1 + 0,4 ↔1 + 0,5 ↔0,5 + 0,4 ↔0,5)/(0,8 + 0,4 + 0,5 + 0,4) = ↔0,8
Выход регулятора соответствует k1 = z = ↔1 (минимальный).
Рассмотрим конкретный вариант выбора решения коэффициента k2 при следующих значениях входных переменных: ΔV = -2ºC, d2T/dt2 = 2ºC/цикл.
ά1 =min(1; 0,8) = 0,8 и z = ↔1
ά2 =min(0,4; 0,8) = 0,4 и z = ↔0,5
ά3 =min(1; 0,5) = 0,5 и z = 0
ά4 =min(0,4; 0,5) = 0,4 и z = 0,5
Выход регулятора:
Z = (0,8 ↔1 + 0,4 ↔0,5 + 0,5 0 + 0,4 0,5)/(0,8 + 0,4 + 0,5 + 0,4) = ↔0,4
Выход регулятора соответствует k2 = z = ↔0,5 (малый).
Рассмотрим конкретный вариант выбора решения коэффициента k3 при следующих значениях входных переменных: ΔV = -2ºC, d2T/dt2 = 2ºC/цикл.
ά1 =min(1; 0,8) = 0,8 и z = ↔1
ά2 =min(0,4; 0,8) = 0,4 и z = ↔0,5
ά3 =min(1; 0,5) = 0,5 и z = ↔0,5
ά4 =min(0,4; 0,5) = 0,4 и z = 0
Выход регулятора:
Z = (0,8 ↔1 + 0,4 ↔0,5 + 0,5 ↔0,5 + 0,4 ↔0)/(0,8 + 0,4 + 0,5 + 0,4) = ↔0,6
Выход регулятора соответствует k3 = z = ↔0,5 (малый).
Аналогично формализуются операции на участках «полочка», «охлаждение» при принятии нестандартных решений.
Реализация данного алгоритма в виде традиционного регулятора и нечеткого корректора коэффициентов усиления в дополнительном контуре управления позволяет адекватно реагировать на возмущающие воздействия технологического процесса, оперативно передать знания и функции оператора системе управления для повышения эффективности управления.